Managing high traffic at border crossings necessitates secure, efficient technologies. Sensors monitor vehicles entering and exiting the queue and relay that information to a traffic management center. While there are often limitations with video cameras and radar sensors, 3D light detection and ranging (LiDAR) sensors — such as those installed in self-driving cars — can fill in more of the picture for border crossing traffic monitoring.
Texas A&M Transportation Institute (TTI) researchers in the Center for International Intelligent Transportation Research (CIITR) are currently implementing a pilot roadside LiDAR-based traffic monitoring system at international ports of entry (POEs). TTI Associate Research Scientist Jason Wu serves as principal investigator (PI), with David Galicia, associate research scientist, as co-PI. Their team includes Minh Le, associate research engineer and Dallas program manager, and Debayan Mandal, graduate research assistant in Texas A&M University’s Department of Geography.
“LiDAR sensors show promise in autonomous vehicles (AVs) and allow an AV to ‘see’ its surroundings with high frequency and high precision, and using self-driving,” shares Wu. “However, if we only apply LiDAR sensors at an in-vehicle detection environment, LiDAR’s application or capacity will be greatly limited. That’s why I started to think about deploying LiDAR sensors at the roadside to capture high-resolution and high-accuracy traffic information in the real world. I called them roadside or infrastructure-based LiDAR applications. I’m really thankful for the support from the CIITR and the Safety through Disruption (Safe-D) University Transportation Center (UTC), which move my ideas from conceptual ones to real-world applications. I strongly believe that America’s infrastructure can be strengthened or become smarter by leveraging these roadside LiDAR-based sensing technologies.”
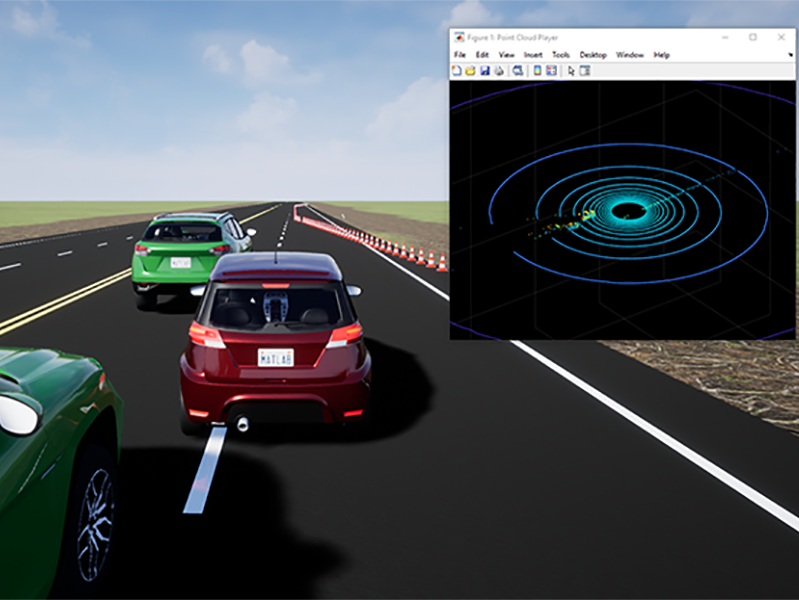
The research team has built simulations of border-crossing scenarios depicting vehicles, motorcyclists, pedestrians and bicyclists and generated synthetic LiDAR traffic datasets for the purpose of the system and algorithms’ development. To address various scenarios, the team is creating additional simulation models and traffic datasets. The researchers also plan to:
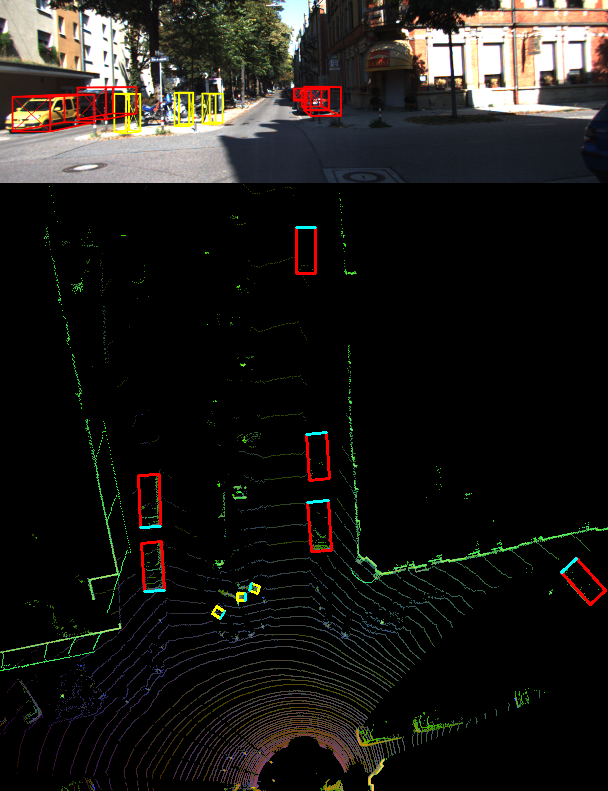
- make 3D deep learning models for roadside LiDAR applications,
- develop a real-time LiDAR-based multi-modal traffic monitoring system, and
- implement and test the pilot system at selected POE sites in El Paso/Ciudad Juárez.
The findings can assist border management agencies anticipate challenges, logistics and opportunities in a connected-traffic environment, especially as connected infrastructure increases in popularity and prevalence. The El Paso/Ciudad Juárez region, in particular, could benefit from piloting LiDAR at border crossings and position itself as a leader in border traffic data collection and planning.
“LiDAR research can make it possible for transportation planners to stay in tune with a connected-vehicle environment,” says Jianming Ma, director of the Texas Department of Transportation’s Traffic Management Section in the Traffic Safety Division. “Connected and automated vehicles have the potential to not only improve safety for the traveling public, but also provide traffic data for mitigating congestion. Jason’s LiDAR work contributes to a bank of knowledge and applications that creates a foundation for the future.”

Wu also applies LiDAR to work zone safety in the Development of a Roadside LiDAR-Based Situational Awareness System for Work Zone Safety: Proof-of-Concept Study. The study is part of a Safe-D UTC project with Sue Chrysler, Safe-D associate director and TTI senior research scientist. Growing his expertise, Wu presented Building a Smart Work Zone Using Roadside LiDAR at the 2021 Institute of Electrical and Electronics Engineers (IEEE) Intelligent Transportation Systems Conference.
“Warning systems can make a big difference for roadway worker safety,” notes Ullman. “LiDAR sensors capture real-time information on a vehicle’s speed, current location and direction. Having that information available is key for workers to take appropriate evasive actions. Even beyond work zones, as Jason’s research illustrates, LiDAR can apply to many facets of transportation safety, planning and operations — applications that’ll only expand in the future.”